
User:Bevomeister/sandbox
| This is not a Wikipedia article: It is an individual user's work-in-progress page, and may be incomplete and/or unreliable. For guidance on developing this draft, see Wikipedia:So you made a userspace draft. Find sources: Google (books · news · scholar · free images · WP refs) · FENS · JSTOR · TWL |
| File:DRAFT logo.png DRAFT PoliTo logo
| |
| Company type | Student association |
|---|---|
| Founded | September 2019 |
| Founders | Francesco Marino Luigi Mascolo Dario Riccobono |
| Headquarters | Polytechnic University of Turin, Italy PoliTO Interdepartmental Center for Service Robotics (PIC4SeR) |
Key people | Prof. Giorgio Guglieri Prof. Fabio Dovis |
| Members | 95 (2021) |
| Website | www.draftpolito.it |
DRones Autonomous Flight Team (DRAFT)[edit]
DRAFT PoliTo is a student team founded in 2019 at Politecnico di Torino that develops innovative solutions in the field of Artificial Intelligence, aimed to expand the capabilities of the increasing drone technology. The nature of the team and the treated topics lead to the need of an interdisciplinary environment, where the knowledge of different areas can be synergistically exploited. For this reason, the team is made up of students from a large fraction of the faculties contained within the Politecnico, representing a fertile field for the interaction and development of inter-faculty research fields.
History[edit]
The Team was founded in 2019 by Francesco Marino, Dario Riccobono and Luigi Mascolo, three alumni of the university, under the supervision of Prof. Giorgio Guglieri and Prof. Fabio Dovis. The vision and the main purpose was to promote the technical and social growth of students by engaging in challenging projects in a multicultural environment assessing the progresses and the new technologies developed by the team in different competitions. In November 2019, the company Leonardo, one of the world leaders in aerospace, shown its interest in the project by founding the Leonardo Drone contest, a competition studied to prove the solutions provided by different universities to specific problems, in a real case scenario. At the foundation, the team counted 16 people overall divided in 4 groups (tribes) each in charge with a certain aspect of the Leonardo competition requirements (see in section Structure and Organization).
In 2020 the dimension of the team has considerably grown, leading to the renovation of the organization: the 4 groups for the Leonardo competition were preserved but a further group in charge with dissemination and administration was found. Moreover, several projects covering a large area of interest have been started to increase the internal knowledge on the state of the art technology. Currently (2022), the team counts 95 people and the production of repositories and documentation regarding codes and simulation force to create a further tribe in charge for the organization, homogenization and verification of the algorithms.
Competitions[edit]
The Leonardo Drone Contest has represented the starting point for the team. It takes place every year around September at the Leonardo Aircraft Division’s site in Turin and has seen as contestants six universities:

- Politecnico di Torino
- Politecnico di Milano
- Alma Mater Studiorum - University of Bologna
- Sant’Anna School of Advanced Studies - University of Pisa
- Tor Vergata - University of Rome
- Federico II - University of Naples
The first race held in September 2020 was aimed to realize a drone able to map the external environment and find QR codes spread around the race field without the possibility to use GPS and Lidar technologies, i.e. relying only on cameras and proximity sensors. After their localization, the drone had to land within the border of the QR code and takeoff newly to continue the sequence. With two QR codes identified the DRAFT obtained the fourth position in the standings following, in ascending order, the universities of Naples, Bologna and Milan.[1]
In the second race, some further difficulties where added: this time the drone must first locate a code positioned on the top of two TurtleBots moving around on the race field, in order to know the correct landing sequence on the other codes. The fact that the drone does not know a priori where the bots are, force to accomplish a first random mapping of the field to locate them. Successively, since only one of the code gives the sequence, the drone must read and verify that the identified one is correct. Only then the search can start. The DRAFT team gained the third position in the rankings thanks to a particular speed, following the University of Rome (second) and Milan (first).[2]
The expansion of 2020 led the team, in collaboration with the Politecnico student group PoliTOmoon formed by team DIANA and the Politecnico Interdepartmental Center 4 Service Robotics (PIC4SeR), to participate at the Space Resources Challenge in Netherlands organized by the European Space Agency (ESA) and the European Space Resources Innovation Center (ESRIC) on November 2021.[3] [4] The competition took place among 13 European groups and was aimed to promote the development of innovative technologies for the recognition and mapping of the resources located at the south pole of the moon. The team proposed the collaboration of a drone and a rover to accomplish the mission.
Projects[edit]
Parallelly to the competitions, the research projects represent the core of the team activities.[5] As can be deduced from the Leonardo Drone Contest rules, the idea behind the avoidance of GPS and Lidar technology is to allow the drone to reliably fly in an indoor environment. In fact, these technologies are not suitable for small and confined spaces and other methods for localization and mapping must be used, mainly relying on images. Coupling tracking-, depth- and mono-cameras with both classical computer vision and deep learning algorithms, the drone becomes able to localize itself and the object in space. The three main projects connected to this area are:
- Just A Rather Intelligent Machine (JARIM): it aims to realize a remotely controlled car able to move autonomously inside an environment relying on the use of a mono-camera for object detection by means of image segmentation algorithms. Reinforcement learning methods exploiting simulations are used to train a decision making algorithm that gives autonomy to the car.
- Visual Trajectory Planning (VTP): it aims to expand the knowledge in the area of smart flying, i.e. relying on the use of images and neural networks the drone has to recognize the boarder of an object and calculate the best trajectory through it. As a first stand-alone feature, the goal is to recognize gates and achieve fast trajectory computation in order to participate to speed race like the 2019 AlphaPilot Challenge.[6] Worth to mention are the works recently performed in this direction from the University of Zurich (ETH), particularly from Prof. Scaramuzza et al. [7] [8] regarding drone perception and autonomous flight.
- Long Term SLAM (LTS): aims to solve and expand the solutions available for alternative simultaneous localization and mapping (SLAM). The idea is to create a database containing all the information coming from different tested solutions in term of sensor choice and sensor fusion algorithms to improve the SLAM algorithms' efficiency. To do so, the information are collected first in a simulated environment and successively tested on the real hardware. The data deriving from this last step can be used to improve the database thanks to reinforcement learning approach.
Other research field regard miniaturization, investigated particularly in the Micro Aerial Vehicles (MAVs) where the goal is to realize a fully autonomous mini-drone having directly on-board all the systems needed for data acquisition and analysis from the sensors as well as decision making and flight control algorithms. The challenge lies into achieving all this feature in a very small machine which, consequently, is limited in term of power, available space for boards and mass, which translate in a lower amount of exploitable sensors. The advantage and the impact of this technology are broad. For example, their reduced volume makes them suitable to travel in small and harsh spaces with higher accuracy, limiting the possible damages to people and objects. Moreover, the amount of energy needed during the flight is strongly reduced, meaning a larger time of flight available, which coupled to an improved maneuverability and flexibility, is forecast to provide a reliable platform for the designing of swarms. Moreover, a second project named Swashplateless MAV (SMAV) aimed to research and develop innovative solutions to minimize the number of actuators required to control thrust, roll, pitch and yaw, thus increasing reliability and simplicity, and paving the way to miniaturized, cost-effective, power-efficient aerial vehicles.
Worth to mention is also the research on the increase of drones autonomy. In the Reinforcement Learning Bots (RLBots) project, the team aims to improve the time of flight by exploiting reinforcement learning algorithms and find an equilibrium among the exploitation of the already achieved knowledge and the exploration of unknown territories. The first achievement regards a Deep RL Agent for obstacle avoidance which turn out to be useful in the Leonardo competition, where the drone is meant to fly in the stylized city. Remaining in the area of multi-component simulation, the Team is developing a tool for the comprehensive multidisciplinary design of rotorcrafts named TRIDENT. It exploits Model-Based Systems Engineering (MBSE) techniques to model systems, sub-systems and their mutual interactions providing a single environment for the integrated system-level analysis of drones.
Events[edit]
DRAFT team took part to some non-profit events among which:
- SHAring Researchers’ Passion for Engaging Responsiveness (SHARPER): [9] [10] [11] Italian project sustained by the European Commission for the realization of the European Night of the Researchers. Its aim is to involve all citizens in discovering the profession of researcher and the role they play in the future society through fact-based investigation of the world.
- Wings for Life: no-profit research foundation funding world-class scientific research and clinical trials around the globe aimed at healing the injured spinal cord.
Structure and Organization[edit]
The structure of the team is based on the Spotify Model,[12] indicating a people-driven, autonomous approach fitting the purposes of inter-connection. Each member is responsible for a specific problem, giving a certain autonomy on the identification of a possible solution. Because of the nature of this approach, all the member cooperate synergistically to accomplished the goal. To better coordinate the efforts, a certain structure is defined:
- Tribes: as a first division of the roles, they represent the disciplines of pertinence:
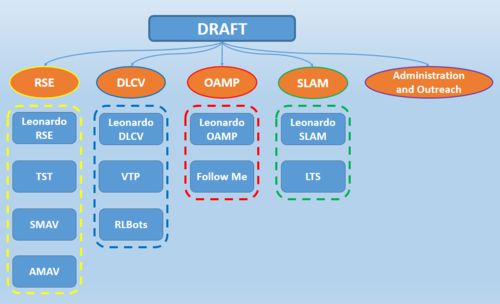
Scheme of the organization of DRAFT PoliTo team. The first division represents the tribes and within the broken line are reported the corresponding squ - Robotics System Engineering (RSE): in charge for the end-to-end systems engineering including the studies on feasibility, cost, architecture, requirements and development of virtual environments.
- Deep Learning and Computer Vision (DLCV): aiming to the capacity of an autonomous system to perceive the environment. This task includes object detection, visual pose estimation and visual trajectory planning exploiting stereovision.
- Obstacle Avoidance and Motion Planning (OAMP): responsible for the obstacle avoidance and trajectory planning algorithms based on the information of the sensor provided by DLCV. In particular is dealt with the subdivision of the map into cells to produce a discrete set of trajectories of the drone and the reduction of the trajectory cost, in energy terms, by selecting only parts of the data necessary for rapid computations.
- Simultaneous Localization And Mapping (SLAM): relying on the information of the sensors like tracking-, depth- and mono-camera and their analysis, is in charge for the design of a 3D environment representing at best the real environment. Consequently, is also responsible for the localization of the drone in the map, in order to be able to compute the best path from a place to another.
- Administration and Social Outreach (ASO): formed in 2021, it takes care of the human resources and organization of events, related also to sponsorship and related activities. To accomplish this, the is responsible for the maintenance of the team web pages and the communication on social medias.
- Development and Operations (DevOps): is the youngest tribe formed in 2022 acquiring the name from the DevOps model. It is in charge with the development of the documentation needed to take track of the algorithms produced by the team or necessary for the activities. They check the requirements necessary for the codes to work and uniform them to allow different part of the script to work together on the same machine.

{kind=link}

- Leonardo Contest Squads: are the groups belonging to the first division in squads, done at the foundation, to better manage the task identified for the Leonardo Drone Contest. The squads inherit the name from the tribe but this division is only nominal since the different squad work together for the tribe's goal. RSE squad built the two prototypes of drone used in the contest, also known as Stige (v. 2020) and Acheronte (v. 2021). Deep learning and computer vision squads deal with image analysis by means of alternative and conventional computer vision algorithm to detect the objects collecting the sensors data and providing the correct outputs needed by other squads. Obstacle avoidance and Trajectory planning squads, belonging to OAMP tribe, take care of translating the information provided by the sensor to the motors to prevent collisions and forecast trajectories, respectively. Finally, SLAM squad act on the visualization of data in 3D environments, the storage of data for future missions and the localization of the drone.

- End-to-End Squads: This squads are working independently to develop stand-alone system that successively can be exploited for different purposes. In other words, these groups are meant to develop assets and internal knowledge that is forecast to be useful is future phases of the projects.
- Test Infrastructure (TST) squad (RSE tribe) takes care of the development of TRIDENT software. The scope of this activity is to provide a test infrastructure allowing to test the performances of different drone components.
- Swashplateless MAV (SMAV) squad (RSE tribe) is responsible for the research of advanced solution for the reduction of the number of actuator to control the motion of the drone.
- Autonomous MAV (AMAV) squad (RSE tribe) takes care of the AMAV project for the miniaturization of the drone both on the physical side, with the identification of the requirements, and virtual one, with simulation, development and integration of on-board software, hardware/software integration, test and verification.

- Visual Trajectory Planning (VTP) squad (DLCV tribe) is in charge for the corresponding VTP project aiming to participate the speed drone racing in 2022/2023, developing an autonomous drone able to perform gate recognition and trajectory planning on an agile platform. The hardware and software aspect of the challenge are faced internally to this squad, taking advantage from the expertise acquired by RSE tribe on the designing of drones.
- Reinforcement Learning Bots (RLBots) squad (DLCV tribe) which studies the possibility to apply deep reinforcement learning at different levels, from basic obstacle avoidance up to autonomous movement and planning, in an unknown environment.
- Follow Me Squad squad (OAMP tribe) develop a versatile algorithm allowing the drone to follow smoothly different object while in the line-of-sight (LOS). This group was formed to develop internal knowledge on how the drone respond to variation of environmental condition and on the chase of moving target using computer vision algorithms.
- Long Term Support (LTS): squad (SLAM tribe) is responsible for the LTS project and aims to test different approaches that can be found to improve the already-existing SLAM solutions, and analyze the results with tests aimed to evaluate performances. Therefore, it covers many different issues, directly or indirectly related to the SLAM problem, both in the hardware and software fields.
External links[edit]
- "Drone Contest - Aerospace, Defence and Security". Leonardo. Retrieved 2022-01-06.
- "AlphaPilot AI Drone Innovation Challenge". Lockheed Martin. 2020-01-14. Retrieved 2022-01-06.
- "ESA-ESRIC Space Resources Challenge". European Space Agency. Retrieved 2022-01-06.
- "Spinal Cord Research Foundation". Wings for Life. 2021-12-01. Retrieved 2022-01-07.
References[edit]
- ^ "Droni, il Politecnico di Milano ha vinto la sfida dell'AI". InItalia con Virgilio (in Italian). 2020-09-24. Retrieved 2022-01-07.
- ^ Nast, Condé (2021-10-05). "Leonardo Drone Contest: Polimi si aggiudica anche il 2°round". Wired Italia (in Italian). Retrieved 2022-01-07.
- ^ "DET - News". DET. 2020-05-07. Retrieved 2022-01-07.
- ^ "Lunar Robot Wars: ESA-ESRIC Space Resources Challenge". scitechdaily.com. 2021-12-16. Retrieved 2022-01-07.
- ^ Godio, Simone. "PoliTo DRAFT DRones Autonomous Flight Team" (PDF). PhD Student presentation. Retrieved 2022-01-07.
{{cite web}}:|archive-date=requires|archive-url=(help); Check date values in:|archivedate=(help); Unknown parameter|trans_title=ignored (|trans-title=suggested) (help) - ^ Foehn, Philipp; Brescianini, Dario; Kaufmann, Elia; Cieslewski, Titus; Gehrig, Mathias; Muglikar, Manasi; Scaramuzza, Davide (2020-05-26). "AlphaPilot: Autonomous Drone Racing". arXiv.org. Retrieved 2022-01-07.
- ^ Kaufmann, Elia; Loquercio, Antonio; Ranftl, René; Scaramuzza, Davide (2020). "Deep Drone Acrobatics". In Toussaint, Marc; Bicchi, Antonio; Hermans, Tucker (eds.). Proceedings of Robotics: Science and Systems XVI. 16th Conference on Robotics: Science and Systems (RSS 2020). Robotics: Science and Systems Foundation. p. 10. doi:10.15607/RSS.2020.XVI.040. ISBN 978-0992374761.
- ^ Foehn, Philipp; Dario Brescianini; Kaufmann, Elia; Cieslewsk, Titus; Scaramuzza, Davide (2021). "AlphaPilot: autonomous drone racing". Autonomous Robots: 14. doi:10.1007/s10514-021-10011-y. Retrieved 2022-01-06.
- ^ "European Commission". CORDIS. Retrieved 2022-01-07.
- ^ Marie Skłodowska-Curie Actions https://ec.europa.eu/research/mariecurieactions/event/2021-european-researchers-night. Retrieved 2022-01-07.
{{cite web}}: Missing or empty|title=(help) - ^ "Sharing Researchers' Passion for Engaging Responsiveness - The European Researchers' Night in Italy in 2021". Università degli Studi di Palermo - Research Portal. Retrieved 2022-01-07.
- ^ "Spotify Model". CIO Wiki. 2022-01-07. Retrieved 2022-01-07.